In the realm of intelligent mining, the implementation of unmanned mining electric shovels (UMESs) plays a vital role in enhancing excavation efficiency while ensuring energy security. However, these machines face considerable hurdles due to the challenging conditions under which they operate, as well as significant variations in inertia within their front-end mechanisms during the excavation process.
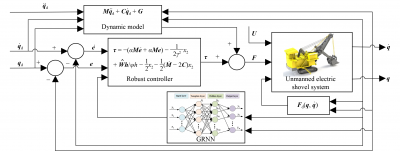
To address these challenges, researchers have developed an adaptive robust control method grounded in the Hamilton-Jacobi inequality. This innovative approach is designed to improve the control of trajectory tracking, which is crucial for the effective operation of UMESs in unpredictable environments.
The development of this control method represents a significant advancement in the field, potentially transforming the operational capabilities of unmanned electric shovels. By enhancing their ability to maintain precise trajectory tracking, the new control strategy aims to optimize operational efficiency, ultimately leading to more productive mining operations.
As the demand for more efficient mining technologies continues to rise, advancements such as these are essential for the future of the industry. The work conducted around the Hamilton-Jacobi inequality not only addresses current operational challenges but also sets the stage for further innovations in autonomous mining equipment.


